

An exciting second update on the Con Bot prototype!
Project progress so far
At the start of this phase the team focused on returning to the basics of Arduino development. Using a starter kit allowed everyone to refresh their knowledge and gain confidence before progressing further. Once this foundation was in place the team began coding the Con Bot so it could move in the required pattern for demisting windows.
Although the movement worked in theory the motors did not perform reliably enough in practice. This led to an important decision to rethink the design approach. The team moved to alternative motors developed a custom chassis and transitioned to a four wheeled layout. Following discussions with Yusra the team also needed to include a suction fan to allow the Con Bot to stay attached to a window.
Con Bot prototype development and testing
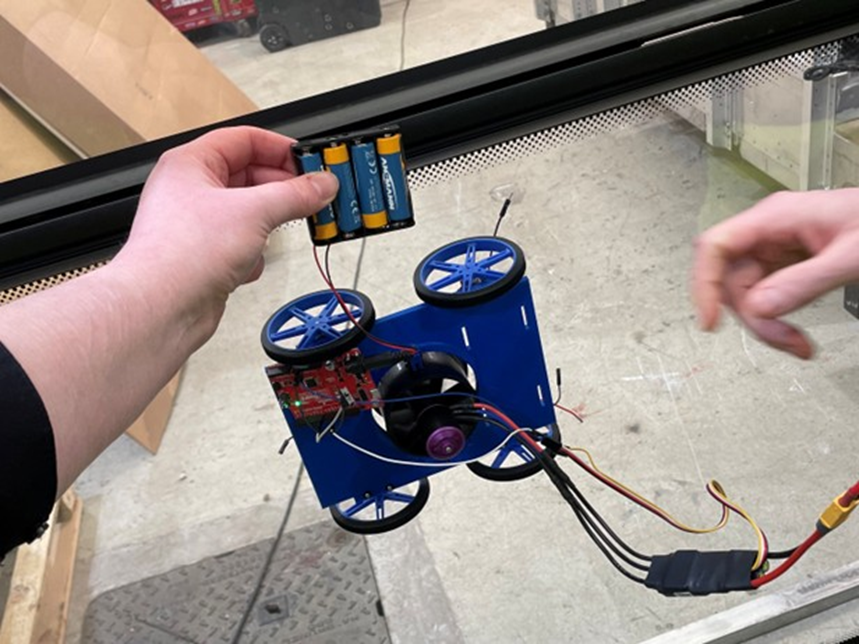
These changes led to the creation of Con Bot mark one. This version included a custom 3D printed chassis designed to house the new components. The main focus was connecting and powering the suction fan which required its own battery. This stage also allowed the team to test how well the components fitted together. The result highlighted space and balance issues which informed improvements for the next build.
The first attempt to test suction on a window showed partial success. The Con Bot did attach but continued to slide down the glass. After reviewing the results the team identified the wheels as the issue since they were too small to create enough contact with the surface.
This insight led to Con Bot mark two. For this version the team focused solely on achieving reliable suction. Only the fan was wired in and larger wheels were introduced. Combined with improved cable management this resulted in successful attachment to the window which marked a major milestone for the Con Bot project at Alexander Dennis.
At this stage the team also considered placing the fan battery off the robot to reduce weight. While this remains an option it would differ from Yusra’s original vision. The team decided to keep this as a backup solution while prioritising an onboard battery setup.
Refining movement suction and control
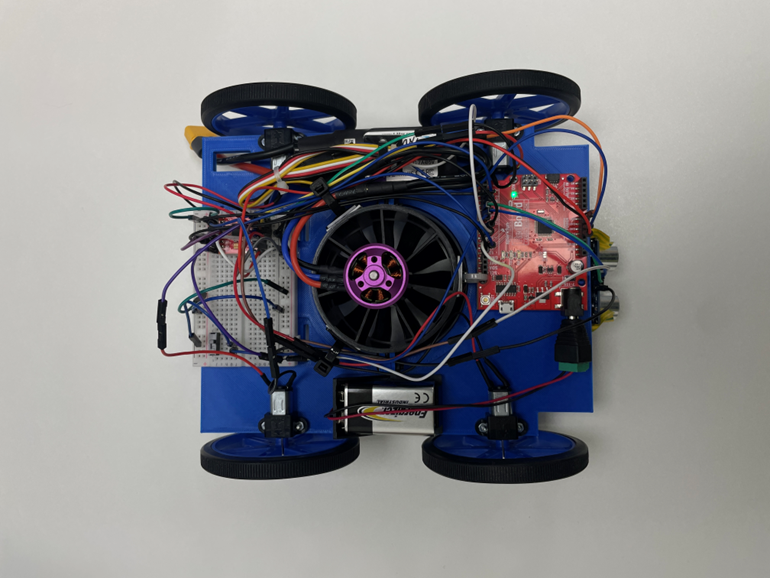
The current version is Con Bot mark three. This iteration includes dedicated spaces to mount all components properly. Updates include a defined breadboard area slots to mount the fan battery underneath the chassis for better balance top mounted motors a switch to a nine volt battery for the Arduino and a proper mounting plate for the ultrasonic distance sensor.
With these changes the Con Bot can now stay attached to the window while also moving. Although it succeeds in both actions the movement pattern is not yet accurate. To address this the team plans a two part improvement approach. This includes adjusting weight balance and introducing a magnetometer alongside further software refinement. These updates will help the Con Bot understand its position and complete reliable ninety degree turns.
Working with Yusra and family engagement
As Yusra is homeschooled the Alexander Dennis ProtoTeam welcomed her and her family to the Skelmersdale site. The visit began with an introduction to Alexander Dennis and the engineers involved in the Con Bot project. The team then shared progress updates and explained how each chassis version had evolved.
As part of this session the team discussed the famous bus tilt test which sparked excitement and curiosity among the younger visitors. Yusra also reviewed the designs as the client and suggested making the Con Bot smaller which will be considered in future iterations.
The family explored the test and development workshop and watched a live demonstration of the Con Bot on a bus window test rig. The day finished with hands on activities including building paper buses with custom designs and learning basic Arduino coding and electronics.

Next steps for the Con Bot prototype
The team is now progressing to Con Bot mark four. This version will include a protective fan cover safety skirts to improve suction and the use of two smaller batteries for better weight distribution. The addition of a magnetometer will support improved movement control.
Once the movement pattern is reliable the team plans to remove the breadboard and solder all components to create the final prototype. A casing will be designed to fit over the top and Yusra has requested a round shape. She will also help design the appearance including colours and patterns. An external switch will be added to ensure the Con Bot is simple and easy to use.
The Alexander Dennis ProtoTeam looks forward to sharing the next update as the Con Bot project continues to develop toward its final form.