

An exciting first look at the Con Bot!
Introduction to the ProtoTeam
The Alexander Dennis ProtoTeam has begun an exciting journey bringing a pupils idea, the ‘Con Bot’ to life from our ‘If you were an engineer what would you do?’ competition. This process encourages teams from industry and universities to work with schools and pupils to bring creative ideas to life. Each team selects one pupil concept from a shortlist and begins the process of turning a drawing into a real prototype. These updates give schools families and the wider public a chance to follow that process from the very start!
This team includes Joanna Averill who is a Lead Engineer for Homologation along with Anna Martindell who works in Software and Mark Kerr who is a Lead Engineer for Diagnostic Development and Support.

Together they form a skilled group ready to take on a clever idea created by a pupil named Yusra.
Why did they choose this idea to build
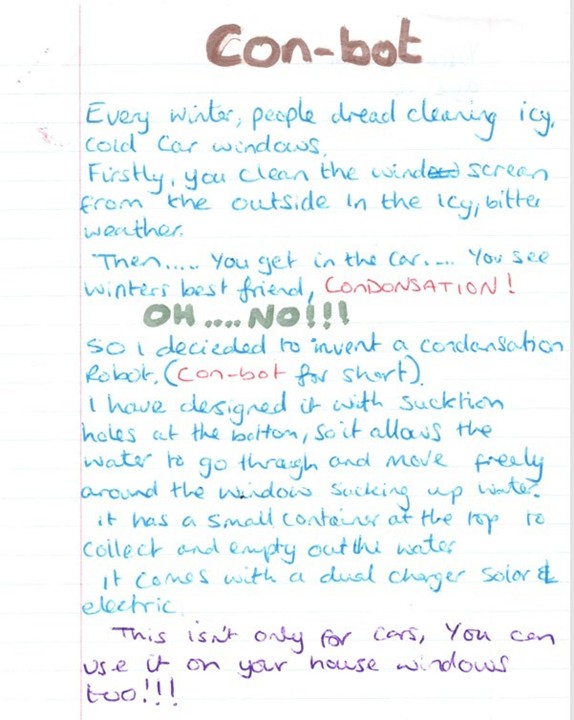
Yusra created a smart and thoughtful idea based on a problem familiar to anyone who travels in a car or bus. Condensation on the inside of windows can be annoying and at times difficult to clear. A demister works on a windscreen but not on side windows. This sparked her idea for a small robot that could move across the glass and clear the mist as it goes.
The team felt that her idea had great potential and could even be adapted for use on buses. They also liked that the concept offered several interesting challenges. They want to explore how the robot can stay attached to the window, how it can sense the edge of the glass and how it can stay light enough while having enough power to remove the condensation. These real engineering questions make the project creative and rewarding.
Starting the prototype
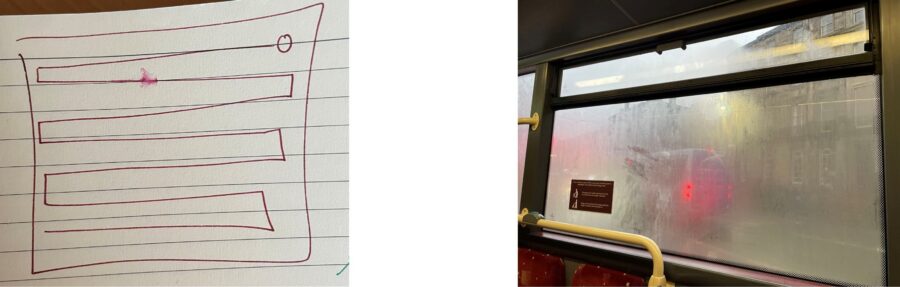
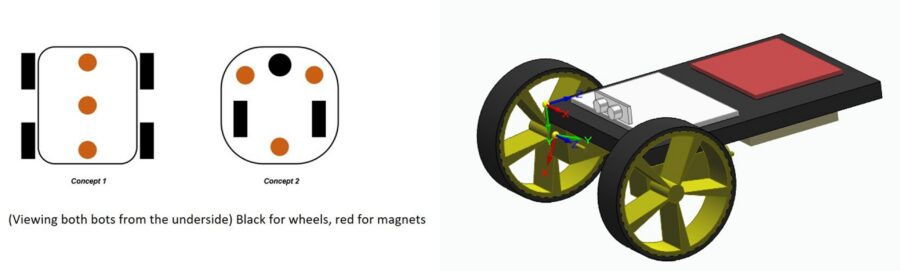
The team began by creating a concept based on Yusra’s idea. They decided to use one device on the inside of the window and another on the outside with magnets holding them together through the glass. This approach helps reduce the power needed which also reduces the weight of the robot. They also chose to use a heating element instead of a suction system. The heat will evaporate the condensation which means the robot does not need a tank to collect water.
Their design includes three main parts. The first is the casing which they will create using computer aided design before printing it in their workshop. The second is the interior mechanism which will allow the robot to move and stay steady. The third is the coding that helps the robot sense edges and move in a pattern that will clear each part of the window. Their plan is to test the robot on a flat surface first before moving on to vertical glass.
Next steps
The team recently met with Yusra and her family to share ideas and talk about the project. They have already built an early version of the robot using an Arduino based kit. They will continue to add parts and design a custom case to help the robot climb upward on a window.
At this stage they have drawings of the outer casing and a model of the inside structure. They hope to use their second concept for the final design because it matches Yusra’s vision more closely and creates a neater shape. They first planned to use magnets to hold the robot in place but after speaking with Yusra they will also explore suction to see which method works better.
Over the next few weeks the team will add the components needed to remove condensation and support movement across the glass. They will continue to code the robot so it can sense window edges and follow the planned route. They will also complete the design of the casing and print the first version before testing it. Once the casing is ready they can look at what magnets or suction options provide the best support for the robot as it begins its first attempt at vertical movement.
The team is excited to keep working on the Con Bot and looks forward to sharing more progress soon!